В наши дни роботы успели занять прочные позиции. Они работают практически в каждой научной отрасли. Мы разобрались, что нового придумали люди в данной сфере.
Точность новой системы, управляемой дронами, доказана светографикой

PRENAV, компания из Америки, наглядно показала точность деятельности, разработанной ей, навигационной системы для беспилотников. Для этого использовали промо-ролик, снабженный элементами светографики. Видео уже опубликовали на Vimeo. О том, как его создавали, есть информация на сайте компании.
Управляющая коммерческими беспилотниками система PRENAV включает в себя робота, находящегося на земле, а также мультикоптер. Наземный робот, сканируя окружающий мир, следит за перемещениями дрона. Направление полета он указывает лазерным лучом с точностью до сантиметра. Точность определения позиции летательного аппарата в этом случае намного выше, чем при применении GPS. Это делает возможным применение мультикоптеров для исследования состояния различных промышленных объектов не только в вместе с наземным устройством, но и в автоматическом режиме, с учетом программы полета, заданной заранее.
Светографикой называют методику получения фотографий на длинной выдержке, подразумевающей перемещение в кадре в темноте периодически включающегося или постоянного источника света. На снимке, таким образом, выходят световые надписи, узоры или же любые иные, задуманные авторами съемки, фигуры. Промо-ролик PRENAV снят с применением одного беспилотника. Несколько снимков затем объединили в анимацию.
Бригадиры заменены на стройке дронами

Ученые Иллинойского университета создали специальную систему, позволяющую следить с помощью дронов за процессом возведения различных объектов, а также – находить места, где возведение приостановилось по той или иной причине.
Уже применяют эту систему при возведении, расположенного в Калифорнии, нового стадиона. Ежедневно несколько дронов взмывают в воздух, облетая по кругу область стройки. Программное обеспечение производит анализ полученного видео, а также создает 3D-модель возводимого объекта. После этого можно сопоставлять скорость и возведения с первоначально спланированным проектом. Разработчики утверждают, что заложили в систему ключевые точки объекта. По тому, где именно произошло замедление, можно относительно точно выявить слабое место, выяснив причину отставания в графике.
Такая система способна облегчить отслеживание и координацию труда на возводимом объекте. В соответствии с исследованием, опубликованном в 2009 году, как раз недочеты в планировании, а также в координации работ и коммуникациях становятся ведущей причиной замедления темпов при возведении.
Медики создали робота, которого «тошнит»
В Университете штата Северная Каролина в Роли группа ученых, руководимая Ли-Энн Джейкус, сконструировала робота, имитирующего рвоту. Собрали это устройство для исследования распространения норовируса.
Создали данного робота, чтобы проверить теорию, в соответствии с которой, распространяться норовирус может при рвоте воздушно-капельным путем. В «рвотной машине» предусмотрели искусственные органы: рот, пищевод и желудок. В содержимое последнего добавляют смесь вирионов MS2. Она подходит для эксперимента по характеристикам, однако не так опасна человеку, как норовирус. После этого в специфической камере симулировали рвоту. При этом датчики регистрировали присутствие воздухе вируса.
Как установили, в воздух при рвоте, на самом деле, попадает зараженный аэрозоль. При этом концентрация его напрямую связана с объемом в желудке зараженного содержимого, а также с давлением, с которым подавали имитацию рвоты. Часть вирусологов ранее предполагала, что так оно и есть. Однако группа Ли-Энн Джейкус смогла впервые доказать данную идею экспериментально.
Норовирусы являются самой распространенной причиной различных эпидемий желудочно-кишечных болезней небактериальной природы по всему миру. Передаются при этом вирусы либо через зараженную воду с пищей, либо при непосредственном контакте с больным. Самой эффективной профилактикой заражения норавирусами принято считать мытье рук.
Робот сам смог научиться выпекать блинчики
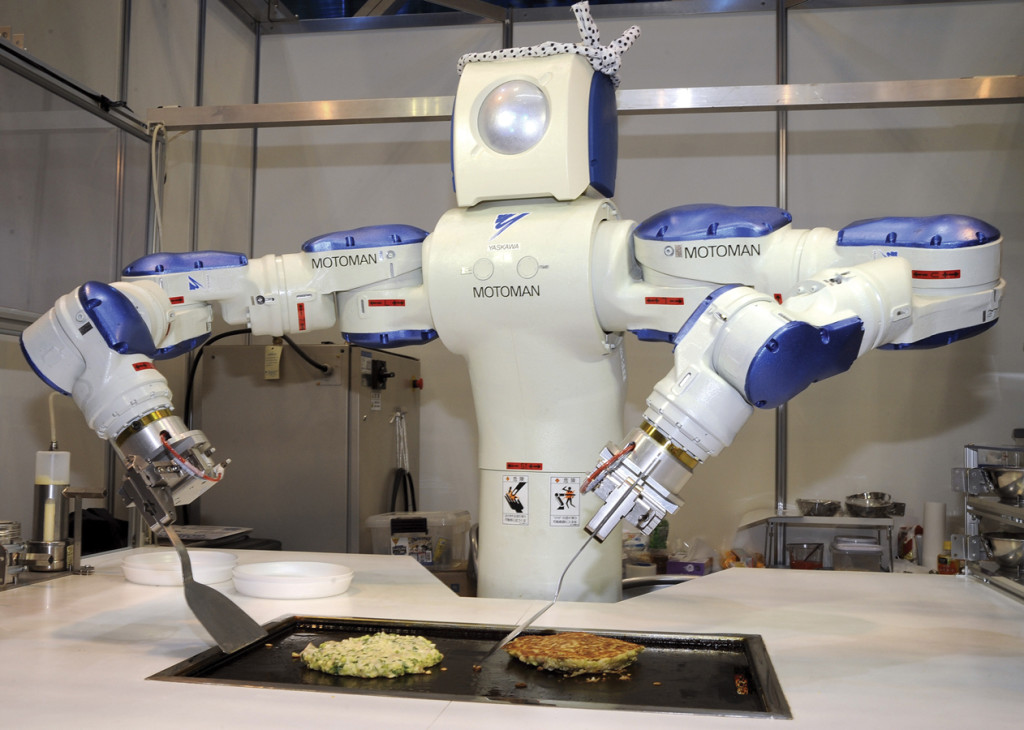
В Институте искусственного интеллекта Бременского университета ученые из проекта RoboHow обучили роботов применять письменные инструкции для того, чтобы решать разнообразные задачи. Подробности появились на сайте проекта, краткая информация – в ряде СМИ.
Немецкие специалисты в роли источника для инструкции применили, среди прочего, и портал WikiHow. Помимо инструкций в виде текста, робот способен также анализировать видеоролики, которые рассказывают о производственном процессе. Проанализировав инструкцию и получив, при необходимости, небольшую корректировку от человека, робот обучается справляться с задачей самостоятельно.
Как правило, работы ведутся на базе научно-исследовательского, очень популярного робота PR2. По указанным выше инструкциям, роботов научили справляться с приготовлением пиццы и блинчиков. Параметры благополучно исполненной задачи в результате вносят в единую базу данных Open Ease. После этого другой робот может применять эти данные.
Такие исследования необходимы для дальнейшего развития робототехники. Ведь они помогают переводить управление роботами от точнейшего программирования каждого движения к более высокому уровню при постановке задач. В будущем такой подход сделает возможной подачу голосовой команды действия роботу. Далее, применяя накопленные знания, устройство будет самостоятельно справляться с поставленной задачей.
Французские ученые несколько раньше создали программное обеспечение, научившееся по видео-инструкции с YouTube сменять колесо на автомобиле.
Инженером создан миниатюрный цилиндрический робот
Максимилиан Керн, инженер, зарегистрированный под ником Wingman на портале Let's make robots, создал миниатюрного цилиндрического робота. На портале Thingverse есть подробная информация о проекте, а также файлы с деталями робота, которые можно распечатать на 3D-принтере. Робот Attiny Can является цилиндром на паре колес, способным передвигаться, не теряя вертикальной ориентации корпуса. У робота колеса с корпусом распечатаны на 3D-принтере из PLA-пластика. Устройство двигается под управлением микроконтроллера Atmel Attiny85. На него команды передаются от телевизионного модифицированного пульта дистанционного управления по инфракрасному каналу.
Цилиндрического робота снабдили особыми ультразвуковыми сенсорами. Именно они помогают ему, самостоятельно передвигаясь, избегать столкновений с различными препятствиями. Конструктор говорит, что пока у робота есть еще ряд недоработок. Среди прочего Attiny Can не очень хорошо сохраняет равновесие. Также у него нет разъема для зарядки батареи и обновления ПО. Для реализации этого придется снять колеса с верхней части корпуса.
Вообще, развитие технологий позволяет все чаще применять 3D-печать при изготовлении роботов. Например, житель Екатеринбурга собрал с ее помощью рабочую модель марсохода, сотрудники Чилийского университета сделали пневматический шагающий октаэдр, а американские ученые напечатали взрывную роболягушку. Существует, кроме того, программная платформа, позволяющая, спроектировав робота, проверить его затем в симуляторе и отправить для изготовления деталей на 3D-принтер.
Робот-спасатель научился ломать стены и получил рефлексы человека
Ученые из Массачусетского технологического института снабдили своего телеуправляемого робота особой системой обратной связи, передающей физическое сопротивление объектов оператору и позволяющей контролировать равновесие робота. Демонстрационное видео уже опубликовали на YouTube, на канале MIT. Управлять роботом оператор может через особый экзоскелет с физической передачей. Таким образом, решается непростая для современной робототехники проблема сохранения у шагающего устройства равновесия. С помощью особых очков и камер оператор от первого лица следит за всем происходящим вокруг робота. На рукоятках экзоскелета установили специальные кнопки для робопальцев. Человек использует их, чтобы контролировать силу сжатия предметов, а также применять инструменты, предназначенные изначально для людей.
Благодаря силе активаторов и прочности конечности, робот может запросто проламывать стены. В тоже время систему обратной связи настроили так, что оператор может выполнять даже действия, которые связаны с мелкой моторикой. В ролике показано, как в стакан наливается напиток из термоса.
Создатели говорят, что потом можно будет внедрить в систему управления этим роботом искусственный интеллект. Хотя на нынешнем уровне развития роботехники лучше для спасательных работ применять все же живого оператора.
Робот-водомерка может скакать над водой
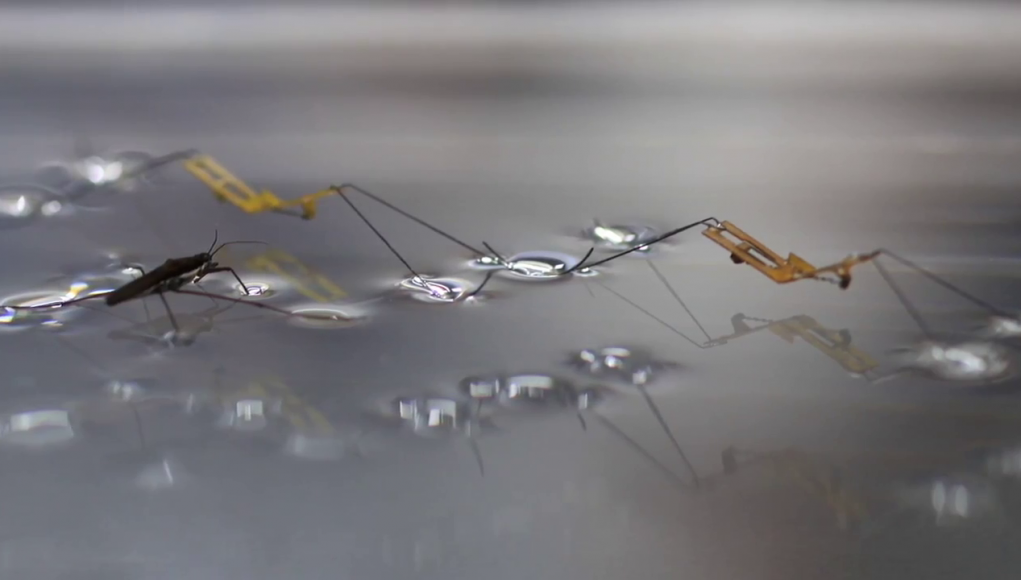
Международная группа специалистов по робототехнике и биологов разработала крошечного багбота, робота-насекомого, напоминающего строением клопов-водомерок. Подобно естественному своему прототипу, роботы умеют гулять по воде и, отталкиваясь от поверхности ее, совершать немалые прыжки. Статью, в которой описан этот робот, уже опубликовали в журнале Science.
Робот этот примерно в два раза побольше клопа-водомерки. Весит он 68 миллиграммов. Тело устройства находится в одном сантиметре от водной поверхности. Его оборудовали четырьмя ножками по пять сантиметров длиной, покрытыми водоотталкивающим покрытием. Строение, вес и размеры багбота подобрали так, чтобы поверхностное водное натяжение могло удерживать его, давая возможность отталкиваться для совершения прыжков.
Как показали предварительные исследования, водомерки перед прыжком вращают внутрь изогнутыми концами своих лапок с довольно незначительной скоростью и силой, слегка меньшей, чем необходимо, чтобы прорвать водную поверхность (примерно 144 миллиньютона на метр). Ножки багбота изначально выгнули под требуемым углом, немного больше, чем у водомерок. В прыжке он также применяет одновременное движение всеми своими конечностями, управляемое сжимающейся под воздействием тепла тонко настроенной пружинкой.
Как показали эксперименты, наибольшая высота прыжка робота превышает четырнадцать сантиметров. Багбот при этом испытывает короткие перегрузки величиной в 13,8 g.
Специалисты и ученые полагают, что дальнейшая разработка сделает возможным дополнительное расширение потенциальных возможностей использования багботов. Например, организовав их взаимодействующие стаи, можно применять багботы в водных поисково-спасательных операциях, а также для диверсий или разведки. Для программирования таких «роящихся» роботов уже разработали скриптовый язык под названием Buzz. Он поможет адаптировать багботов к решению таких задач.
Прыжки по водной поверхности являются уникальным видом локомоции, выявленным только у некоторых видов полуводных насекомых. Ученые раньше создавали роботов, умеющих ходить по воде, правда, прыгать они до сих пор не могли.