Мы привыкли к тому, что при создании роботов инженеры вдохновляются движениями разнообразных животных: от моллюсков и змей до собак и гепардов. Но группа европейских исследователей, работающая под руководством Барбары Маццолай (Barbara Mazzolai) решила сломать устоявшиеся стереотипы и обратилась на первый взгляд к статичным объектам – растениям, точнее, к их важной составляющей.
В центре внимания учёных оказались корни, которые обладают уникальными природными способностями вести разведку и прокладывать свой путь сквозь неоднородный грунт, меняя по мере необходимости направление роста. Новый проект получил название PLANTOID.
В него заложены две основные цели:
• первое — обобщить и воплотить в робототехнике основные принципы, которые позволяют корням растений эффективно распространяться по почве и функционировать под землёй и —
• второе — разработать новые научные гипотезы и модели, касающиеся неизученных ранее аспектов развития корневой системы, таких как роль локальной связи корневых вершин в процессе адаптивного роста, или сбор сенсорной информации от всех отростков для принятия (ни больше, ни меньше) коллективных решений.
Рис. 1. Ствол плантоида служит корпусом для микропроцессора, а ветви оснащены датчиками для анализа окружающей среды.
На данный момент команда изготовила первый прототип робота-дерева или плантоида, который оснащён двумя корнями.
Один из них оборудован концевыми датчиками и может изгибаться, когда возникает необходимость обойти камень или фрагмент токсичного грунта, а другой способен удлиняться, имитируя рост.
Ствол плантоида изготовлен с помощью 3D-принтера и служит корпусом для микропроцессора. От него отходят четыре ветви, которые оснащены датчиками, необходимыми для оценки экологической ситуации. С их помощью ведётся сбор информации о температуре, силе тяжести, влажности, присутствии различных химических элементов в окружающей среде.
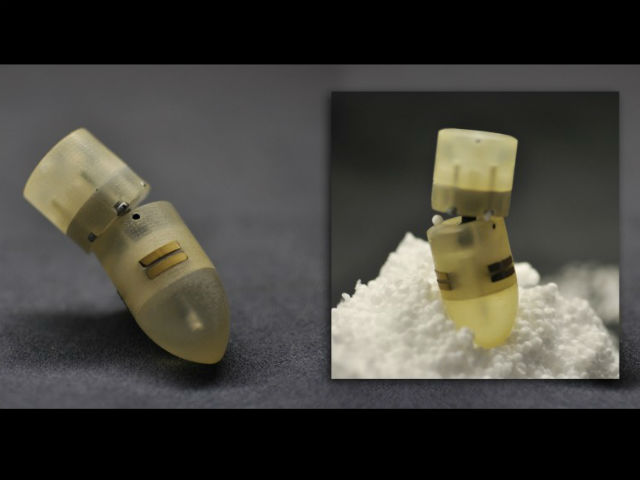
Рис. 2. Корень протипа плантоида, способный огибать препятствия.
Разработчики отмечают, что данная модель является доказательством состоятельности концепции и демонстрацией новых принципов в робототехнике, а потому пока не предназначена для какой-либо конкретной цели. Тем не менее будущее новое разработке предрекают очень разностороннее.
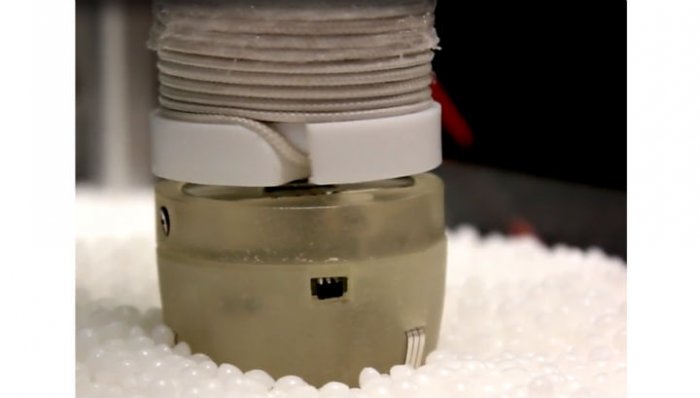
Рис. 3. Растущий корень протипа плантоида.
В первую очередь, плантоиды будут полезны при освоении космоса. Они смогут самостоятельно зафиксироваться на поверхности новых планет и проводить анализ и мониторинг состояния как грунта, так и атмосферы.
Кроме этого для проведения хирургических операций могут быть созданы миниатюрные гибкие эндоскопические роботы-растения.
Более крупные плантоиды могут быть незаменимы для поиска людей, попавших под завалы, например, в ходе стихийных бедствий.

Рис. 4. Роботам-растениям могут доверить анализ и освоение грунта и атмосферы других планет.
Сейчас исследователи продолжают свои разработки, в частности, пытаются объединить разные функции в одном корне, а также занимаются поиском возможных источников энергии плантоида в окружающей среде.
http://www.nanonewsnet.ru/articles/2014/evropeiskie-uchenye-rabotayut-nad-sozdaniem-robotov-rastenii