На сайте Indiegogo идёт сбор средств на претворение в жизнь проекта Prosthesis по созданию огромного робота, полностью управляемого человеком.
По сути, Prosthesis представляет собой гигантский экзоскелет: по задумке разработчиков, оператор будет подниматься в кабину по складной лестнице в передней части и контролировать работу машины при помощи своего тела. Вся конструкция имеет высоту около 5 м и весит приблизительно 3,5 т.
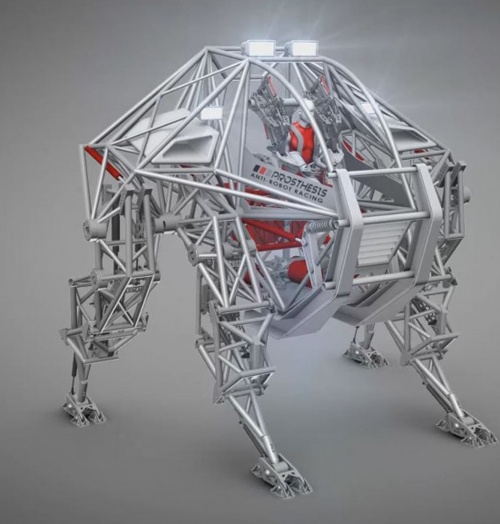
Prosthesis предполагается оснастить четырьмя конечностями с двумя сочленениями каждая. Эти опоры смогут двигаться вперёд и назад, обеспечивая максимальную скорость «бега» в 30 км/ч. За питание отвечает массивный блок ионно-литиевых аккумуляторных батарей, подающих энергию на гидравлические помпы. О времени автономной работы пока ничего не сообщается.

Для машины не планируется создавать систему автопилотирования. Prosthesis будет полагаться исключительно на опыт и сноровку оператора, которому придётся контролировать работу всех четырёх опор при помощи своих ног и рук. Физическая обратная связь поможет удерживать равновесие и корректировать положение робота во время бега. Кроме того, будет обеспечена звуковая и световая сигнализация, которая поможет пилоту оценивать состояние робота.

Авторы проекта называют Prosthesis «первым в мире роботом для соревнований на скорость, полностью управляемым человеком». Машина описывается как смесь «гориллы, тираннозавра и экскаватора».
Разработчики уже сконструировали одну из конечностей Prosthesis в масштабе 2:3. По оценкам, экзоскелет сможет усиливать передаваемые человеком импульсы в 60–100 раз. Выдаваемая силовой установкой мощность достигает 300 л. с. Робот получит настраиваемую оператором систему подвески.

Разработка основной платформы Prosthesis длится около трёх лет. На реализацию проекта требуется примерно $90 тыс. Сейчас через краудфандинговый ресурс привлечено приблизительно $26 тыс.; до закрытия копилки остаётся 10 дней.
Если всё пойдёт по плану, готовый образец Prosthesis будет представлен ближе к концу 2015 года.